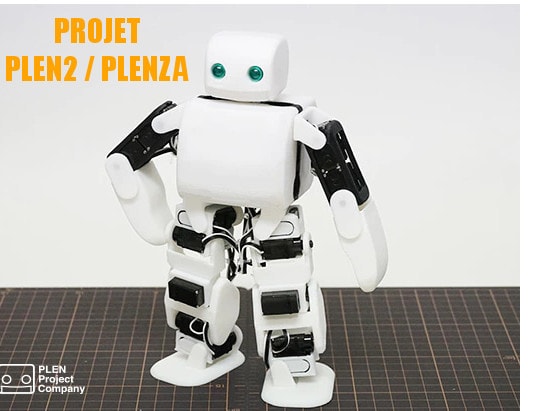
"Projet Robot humanoide plen2 : un robot de 20 cm opensource à construire soit même..."
Issu d'une campagne Kickstarter, le PLEN2, est un robot open source créé par “PLEN Project Committee”.
Sa particularité est d'être un projet opensource. Le code, les models stl sont libres d'utilisation et modification. Ce projet a suscité bcp enthousiasme et vous retrouvez facilement sur internet des vidéos sur ce petit robot humanoïde de 20cm.
Les différentes étapes du projet plen2
Pour la construction de ce robot nous allons découper le projet en 5 étapes:
L'impression d'éléments de test (le bras droit)
La programmation unitaire du bras afin de valider notre choix
L'impression globale
L'assemblage global
L'interface de pilotage
Le choix de la version du plen2
Apres quelques recherches sur internet, j'ai remarqué qu'il y avait plusieurs version (ou clone) du plen2.
Le plen2 : l'original
Le jrobot : un clone du plen2
Le plenza : un clone réadapté pour des moteurs SG90
L'original s’appuyant sur des moteurs type SG9 et une carte propriétaire de pilotage. Je suis parti sur un version "sud affricaine" le "plenza" (opensource lui aussi) mais "re-customisé" pour utiliser des servos moteurs de type SG90 (bcp moins chère) et une carte arduino.
La première étape à été de tester l'impression pour vérifier que les moteurs puissent "rentrer à l’intérieur" et commencer un bout de code pour piloter l’enchaînement du bras par exemple.
Impression du bras
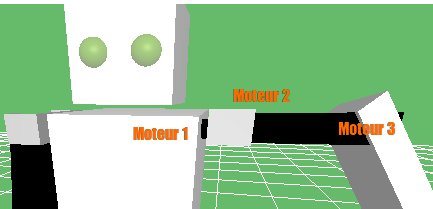
Le bras est constitué de 3 morceaux (plus quelques éléments d'assemblage) : la main, le bras et l'épaule.
2 moteurs rentrent dans le bras. 1 pour piloter la main et l'autre la monté ou descente du bras.
L'épaule possède aussi un moteur pour faire pivoter le bras.
J'ai fait 2 tests d'impressions. Un premier test avec l'orignal plen2. Malheureusement je n'ai pas réussit à "entrer" les moteur SG90 dans le bras.
Le 2eme tests plus concluant en partant du plenza vraiment fait pour les moteurs sg90 est parfait.
 Issu d'une campagne Kickstarter, le PLEN2, est un robot open source créé par “PLEN Project Committee”.
Issu d'une campagne Kickstarter, le PLEN2, est un robot open source créé par “PLEN Project Committee”.
 Robot Otto Arduino : la construction [Etape 1]
Robot Otto Arduino : la construction [Etape 1] Console Leds [Etape 1]
Console Leds [Etape 1] Projet JoyRobot [Etape 1]
Projet JoyRobot [Etape 1] Projet KitCo (console de jeux) [Etape 1]
Projet KitCo (console de jeux) [Etape 1] Projet Mini Robot Brosse à dent
Projet Mini Robot Brosse à dent Robot Voiture en Arduino : la construction [Etape 1]
Robot Voiture en Arduino : la construction [Etape 1] Robot Voiture en Arduino : la programmation [Etape 2]
Robot Voiture en Arduino : la programmation [Etape 2] Traceur CNC en Arduino : la construction [Etape 1]
Traceur CNC en Arduino : la construction [Etape 1]
Posez vos questions, échangeons ensemble
0 commentaire
Formulaire: