robotique3dProjets robotiques
"Programmation du robot car en arduino"
 Voila nous avons testé pour vous la construction de notre premier “robot car” Arduino.
Pour cela 3 étapes sont nécessaires:
Voila nous avons testé pour vous la construction de notre premier “robot car” Arduino.
Pour cela 3 étapes sont nécessaires:
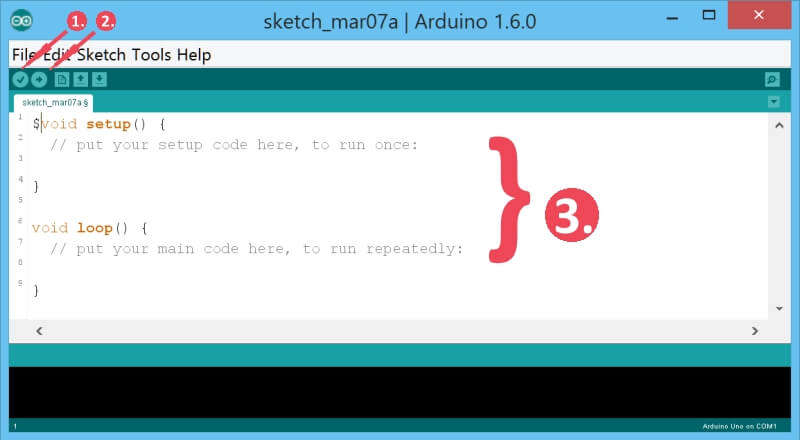
void setup() {
Serial.begin(9600); // ouvre le port serie 9600 bps:
}
void loop() {
Serial.print("Hello world !!");
}
/* Constantes pour les broches */
const byte TRIGGER_PIN = 2; // Broche TRIGGER
const byte ECHO_PIN = 3; // Broche ECHO
void setup() {
Serial.begin(9600); // ouvre le port serie 9600 bps:
/* Initialisation du capteur de distance */
pinMode(TRIGGER_PIN, OUTPUT);
pinMode(ECHO_PIN, INPUT);
}
void loop() {
/* 1. Lance une mesure de distance en envoyant une impulsion HIGH de 10µs sur la broche TRIGGER */
digitalWrite(TRIGGER_PIN, HIGH);
delayMicroseconds(10);
digitalWrite(TRIGGER_PIN, LOW);
/* 2. Mesure le temps entre l'envoi de l'impulsion ultrasonique et son écho (si il existe) */
long measure = pulseIn(ECHO_PIN, HIGH);
/* 3. Calcul la distance à partir du temps mesuré */
float distance_mm = measure / 58;
/* Affiche les résultats */
Serial.print("Distance: ");
Serial.print(distance_mm);
}
// Déclaration des Pins
// motor one
int enA = 10;
int in1 = 9;
int in2 = 8;
// motor two
int enB = 5;
int in3 = 7;
int in4 = 6;
void setup()
{
// initialisation des pins du controle Moteur
pinMode(enA, OUTPUT);
pinMode(enB, OUTPUT);
pinMode(in1, OUTPUT);
pinMode(in2, OUTPUT);
pinMode(in3, OUTPUT);
pinMode(in4, OUTPUT);
}
void loop()
{
// démarre les 2 moteurs
digitalWrite(in1, HIGH);
digitalWrite(in2, LOW);
digitalWrite(in3, HIGH);
digitalWrite(in4, LOW);
delay(2000); // avance 2 sec.
// stop le moteur 1 pour faire pivoter le robot
digitalWrite(in1, HIGH);
digitalWrite(in2, LOW);
delay(500); // tourne 500ms.
// arret du robot
digitalWrite(in1, LOW);
digitalWrite(in2, LOW);
digitalWrite(in3, LOW);
digitalWrite(in4, LOW);
delay(1000); // arrêt pendant 1sec.
}
/* Inclut la lib Servo pour manipuler le servomoteur */ #include/* Créer un objet Servo pour contrôler le servomoteur */ Servo servoMoteur; void setup() { // Attache le servomoteur à la broche D9 servoMoteur.attach(9); } void loop() { // Fait bouger le bras de 0° à 180° for (int position = 0; position <= 180; position++) { servoMoteur.write(position); delay(15); } // Fait bouger le bras de 180° à 10° for (int position = 180; position >= 0; position--) { servoMoteur.write(position); delay(15); } }
void setup() {
Serial.begin(9600);
}
void loop() {
int val=analogRead(A3);
Serial.print("Présence de la lign noir:"); Serial.println(val);
}
 Robot Otto Arduino : la construction [Etape 1]
Robot Otto Arduino : la construction [Etape 1] Console Leds [Etape 1]
Console Leds [Etape 1] Projet JoyRobot [Etape 1]
Projet JoyRobot [Etape 1] Projet KitCo (console de jeux) [Etape 1]
Projet KitCo (console de jeux) [Etape 1] Projet Plen2 [Etape 1]
Projet Plen2 [Etape 1] Projet Mini Robot Brosse à dent
Projet Mini Robot Brosse à dent Robot Voiture en Arduino : la construction [Etape 1]Robot Voiture en Arduino : la programmation [Etape 2]
Robot Voiture en Arduino : la construction [Etape 1]Robot Voiture en Arduino : la programmation [Etape 2] Traceur CNC en Arduino : la construction [Etape 1]
Traceur CNC en Arduino : la construction [Etape 1]
Posez vos questions, échangeons ensemble
1 commentaire
bonsoir Monsieur , Madame je suis étudiant en classe préparatoire spécialiser en Robotique et système s'information je veux avoir si possible le code Dots Matrix pour réaliser un projet
— Aliou sylla / Tue, 14 Sep 2021
Formulaire: